











МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ БЮДЖЕТНОЕ ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ОБРАЗОВАНИЯ
ТЮМЕНСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
ФИЗИКО-ТЕХНИЧЕСКИЙ ИНСТИТУТ
КАФЕДРА РАДИОФИЗИКИ
Разработка контроллера для работы шагового двигателя в микрошаговом режиме
Курсовая работа по направлению
«Радиофизика»
Выполнил:Студент 3-го курса
Удилов Евгений
Группа:39РФ132
Проверил: доцент кафедры радиофизики, к.ф.-м.н.
Флягин В.М.
Подпись: _______________
Тюмень, 2016
Оглавление
1 Введение. 3
2 Шаговый двигатель. 4
2.1 Особенности шагового двигателя. 4
2.2 Недостатки шагового двигателя. 5
3 Способы управления фазами шагового двигателя. 6
4Микрошаг. 8
4.1 Применение микрошагового режима. 8
4.2Выбор оптимального режима деления микрошага. 9
5Цифро-аналоговый преобразователь. 10
6 Практическая часть. 13
7 Заключение. 16
Список литературы.. 17
Введение
Шаговые двигатели применяются в различных устройствах, где необходимое точное позиционирование. Они встречаются в дисководах, сканерах, принтерах, факсах, а также в разнообразном промышленном и специальном оборудовании. В отличие от обычных коллекторных двигателей, схема управления шагового двигателя гораздо более сложная: необходимо обеспечить 4 плавно изменяющихся во времени напряжения со сдвигом фаз 90о. Упрощенная схема управления использует в качестве питающего напряжения по каждому каналу прямоугольные импульсы. Большинство шаговых двигателей управляется цифровой электроникой через согласующие схемы (например, Н-мосты), и применение прямоугольных импульсов значительно упрощает схему устройства. Но в то же время такой вид управления влечет за собой повышенную нагрузку на механические узлы двигателя за счет ударов, возникающих из-за резкого переключения напряжения на обмотках. С повышением частоты управляющих импульсов вращение вала двигателя ускоряется, из-за чего повышается шум, а значительные вибрации приводят к возникновению резонансных явлений в механике устройства, построенного на шаговом двигателе.
Одним из способов снижения шума и повышения качества работы шагового двигателя является применение микрошага. В идеале вместо прямоугольных импульсов на контакты шагового двигателя должно подаваться напряжение, осциллограмма которого представляет собой положительный полупериод синусоиды, т.е. аналоговый сигнал. Микрошаг разбивает синусоиду на ступеньки, приближая управляющий сигнал к синусоидальной форме, что влечет за собой повышение качества работы шагового двигателя. При использовании микроконтроллера для управления направлением и скоростью вращения шагового двигателя обычно применяются узлы согласования – контроллеры шаговых двигателей, которые берут на себя заботу о формировании управляющих сигналов для получения микрошагового режима работы двигателя.
Представленная работа посвящена разработке цепи преобразования цифровых сигналов с выводов микроконтроллера в аналоговый для управления шаговым двигателем.
2. Шаговый двигатель
Шаговый двигатель – это электромеханическое устройство, преобразующее электрические импульсы в дискретные механические перемещения (шаги).
Шаговые двигатели относятся к классу бесколлекторных двигателей постоянного тока. В связи с этим, они имеют высокую надежность и большой срок службы. В отличие от двигателей постоянного тока, шаговые двигатели требуют значительно более сложных схем управления, которые должны выполнять все коммутации обмоток при работе двигателя.
В шаговом двигателе вращающий момент создается магнитными потоками статора и ротора, которые определенным образом ориентированы друг относительно друга. Статор изготовлен из материала с высокой магнитной проницаемостью и имеет несколько полюсов. Полюса имеют как статор, так и ротор. Чтобы уменьшить потери на вихревые токи, магнитопроводы собирают из отдельных пластин, наподобие сердечника трансформатора. Вращающий момент пропорционален величине магнитного поля, которая пропорциональна току в обмотке и количеству витков. Таким образом, момент зависит от параметров обмоток. Даже если одна из обмоток шагового двигателя запитана, ротор принимает определенное положение. Он будет находиться в этом положении до тех пор, пока внешний приложенный момент не превысит некоторого значения, называемого моментом удержания. После этого ротор повернется и будет стараться принять одно из следующих положений равновесия.
2.1 Особенности шагового двигателя
· Угол поворота ротора (шаг)зависит от числа импульсов, которые поданы на обмотки двигателя
· Двигатель обеспечивает полный момент в режиме остановки (если обмотки запитаны)
· Прецизионное позиционирование и повторяемость. Двигатель имеет точность, порядка 3-5% от величины шага
· Двигатель имеет возможность быстрого старта, остановки и реверсирования
· Отсутствие щёток обеспечивает высокую надежность, срок службы шагового двигателя определяется сроком службы подшипников
· Однозначная зависимость положения от входных импульсов обеспечивает позиционирование без обратной связи
· Можно получить очень низкую скорость вращения для нагрузки, которая присоединяется к валу двигателя без промежуточного редуктора
· Скорость вращения ротора двигателя пропорциональна частоте входных импульсов
2.2. Недостатки шагового двигателя
· Шаговые двигатели подвержены явлению резонанса
· Высока вероятность потери контроля положения ввиду работы без обратной связи
· Потребление энергии постоянно и не уменьшается без нагрузки
· Затруднена работа на высоких скоростях
· Малая удельная мощность
· Сложная схема управления двигателем
3. Способы управления фазами шагового двигателя
Первый способ называется полношаговым без перекрытия фаз. Он обеспечивается попеременной коммутации фаз, в один момент времени включена только одна фаза (рис. 1.а). Этотспособназывают ”onephaseon” fullstepилиwavedrivemode. Точки равновесия ротора для каждого шага совпадают с «естественными» точками равновесия ротора у незапитанного двигателя. Недостатком этого способа управления является то, что для биполярного двигателя в один и тот же момент времени используется 50% обмоток, а для униполярного – только 25%. В таком режиме не может быть получен полный момент.
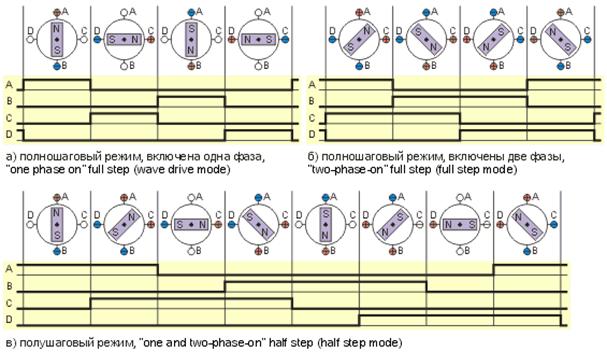
Рис. 1. Различные способы управления фазами шагового двигателя.
Второй способ – полно шаговый режим с перекрытием: две фазы включены в одно и то же время. Его называют ”two-phase-on” full step илипросто full step mode. При этом способе управления ротор фиксируется в промежуточных позициях между полюсами статора (рис. 1.б) и обеспечивается примерно на 40% больший момент, чем в случае одной включенной фазы. Этот способ управления обеспечивает такой же угол шага, как и первый способ, но положение точек равновесия ротора смещено на полшага.
Третий способ является комбинацией первых двух и называется полу шаговым режимом, ”one and two-phase-on” half step или просто half step mode. В этом режиме двигатель делает шаг в половину основного. Каждый второй шаг запитана лишь одна фаза, а в остальных случаях запитаны две (рис. 1.в). В результате угловое перемещение ротора составляет половину угла шага для первых двух способов управления. Этот способ управления позволяет частично избавиться от явления резонанса. Полу шаговый режим обычно не позволяет получить полный момент.
Четвертый способ управления называется микро шаговым режимом или micro stepping mode. При этом способе управления ток в фазах нужно менять небольшими шагами, что обеспечивает дробление половинного шага на еще меньшие микро шаги. Когда одновременно включены две фазы, но их токи не равны, то положение равновесия ротора будет лежать не в середине шага, а в другом месте, которое определяется соотношением токов фаз. Меняя это соотношение, можно обеспечить некоторое количество микро шагов внутри одного шага.
4. Микрошаг
В общем случае под микрошагом понимают микрошаговый режим управления шаговым двигателем, иначе говоря - режим деления шага. Микрошаговый режим отличается от штатного режима управления двигателем тем, что в каждый момент времени обмотки шагового мотора запитаны не полным током, а некими его уровнями, изменяющимися по закону sin в одной фазе и cos во второй. Такой метод дает возможность фиксировать вал в промежуточных положениях между шагами. Количество таких положений задается настройками драйвера. Скажем, режим микрошага 1:8 означает, что с каждым поданным импульсом STEP драйвер будет перемещать вал примерно на 1/8 полного шага, и для полного оборота вала потребуется подать в 8 раз больше импульсов, чем для режима полного шага.
4.1 Применение микрошагового режима
У микро шагового режима может быть несколько применений. В начале разберем несколько заблуждений относительно микрошага:
1. Микрошаг позволяет увеличить точность привода.
На самом деле это не так. Во-первых, этому мешает геометрическая не идеальность ротора и статора двигателя, неидеальные обмотки, зазоры в подшипниках вала и т.п. В результате двигатель выполняет шаги всегда с некоторой погрешностью(как правило, 5% от величины полного шага), причем абсолютное значение погрешности постоянно для любого выбранного микрошагового режима! Кроме того, во многих драйверах управление двигателем также далеко от идеального, что приводит к дополнительной неравномерности перемещения в режиме микрошага. Дальнейшее деление шага более чем на 5-10 микрошагов приводит только к увеличению разрешающей способности привода, но не точности. То есть вы сможете более дискретно задавать позицию в ЧПУ системе, но не сможете её получить с заданной точностью.
2. Микрошаг значительно снижает момент двигателя (относительно полно- шагового режима).
Момент действительно снижается. Однако, использование микрошага одновременно увеличивает плавность хода двигателя, и снижает резонансные явления, что способствует увеличению момента. Два противоположных влияния на момент в среднем более-менее уравновешивают друг друга. В многих случаях применение микрошага на самом деле увеличивает момент, поэтому целесообразность отказа от микрошагового режима должна определяться в каждом конкретном случае.
Основным применением микрошагового режима является борьба с резонансом, снижение вибрации шагового двигателя и повышения плавности хода передачи. Достигается это благодаря тому, что при использовании микрошагового режима на вал мотора действуют более кратковременные усилия разгона-торможения, сам вал совершает шаги меньшей амплитуды, в результате инерционные явления проявлены слабее.
4.2 Выбор оптимального режима деления микрошага
Оптимальный режим деления шага необходимо выбирать в зависимости от конкретного станка и стоящих задач. Основными факторами являются необходимость снизить резонанс двигателей, уменьшить шум, разрешающую способность станка. В большинстве случаев имеет смысл использовать наибольшее деление шага, при котором станок сможет развивать расчетную максимальную скорость. Ограничением в данном случае будет максимальная частота входных импульсов у драйвера или максимальная частота генерации управляющих импульсов ЧПУ-системой. Скажем, скорость вращения 10 об/сек стандартного двигателя с шагом 1.8 град требует подавать импульсы STEP с частотой 2000 Гц для режима полного шага и с частотой 256 КГц для деления шага 1:128, тогда как, например, программа Mach3 максимально может генерировать импульсы с частотой 100 Гц.
5. Цифро-аналоговый преобразователь
Цифро-аналоговый преобразователь — устройство для перевода цифровых данных в аналоговый сигнал. Это своеобразный мост между аналоговой и цифровой частями схемы. Сфера применения ЦАП очень широка. Это усилители звука, аудиокодеки, обработка видео, устройства отображения, системы распознавания данных, калибровка датчиков и других измерительных устройств, схемы управления двигателями, системы распределения данных, цифровые потенциометры, программируемое радио (SDR) и т.д.
Принцип работы ЦАП заключается в суммировании аналоговых сигналов (ток или напряжение). Суммирование производится с коэффициентами, равными нулю или единице в зависимости от значения соответствующего разряда кода. Выходной сигнал ЦАП может иметь форму тока, напряжения или заряда. Преобразователи с токовым выходом используются в основном в прецизионных и высокочастотных схемах. Для определенности мы будем рассматривать ЦАП с выходным напряжением, как наиболее распространенные. Из таблицы 1 видно, что максимальное выходное напряжение на 1 МЗР (младший значащий разряд входного кода) ниже напряжения полной шкалы (ПШ). Некоторые ЦАП позволяют использовать всю шкалу.
|
Входной код |
Выходное |
|
0000 |
0,0000 |
|
0001 |
0,3125 |
|
0010 |
0,6250 |
|
0011 |
0,9375 |
|
0100 |
1,2500 |
|
0101 |
1,5625 |
|
0110 |
1,8750 |
|
0111 |
2,1875 |
|
1000 |
2,5000 |
|
1001 |
2,8125 |
|
1010 |
3,1250 |
|
1011 |
3,4375 |
|
1100 |
3,7500 |
|
1101 |
4,0625 |
|
1110 |
4,3750 |
|
1111 |
4,6875 |
Таблица 1. Сигналы четырехразрядного ЦАП (опорное напряжение 5 В)
В матрице резисторов R-2R формируется ряд напряжений, отличающихся друг от друга ровно в два раза. Рассмотрим этот механизм. В конце резистивной цепочки находятся два резистора с сопротивлением 2R. Эти резисторы одним концом соединены друг с другом, другие концы присоединены к корпусу схемы, то есть резисторы соединены параллельно. В результате их общее сопротивление равно R. При соединении резистора R и параллельного соединения двух резисторов 2R образуется делитель напряжения с коэффициентом деления 2. В результате напряжение на его выходе будет в два раза меньше напряжения на его входе.
Рисунок 2. Матрица резисторов R-2R
Общее сопротивление делителя составляет 2R, так как сопротивления R в нем соединены последовательно. В результате в следующем звене матрицы ситуация повторяется. Снова образуется параллельное соединение двух резисторов 2R и снова образуется делитель напряжения в два раза. Так как напряжения в узлах матрицы R-2R отличаются друг от друга ровно в два раза, то и ток через резисторы 2R будет отличаться ровно в два раза, то есть подчиняться двоичному закону. Если теперь эти токи подавать или не подавать на вход аналогового сумматора на ОУ в зависимости от входного двоичного числа, то мы получим цифроаналоговый преобразователь.
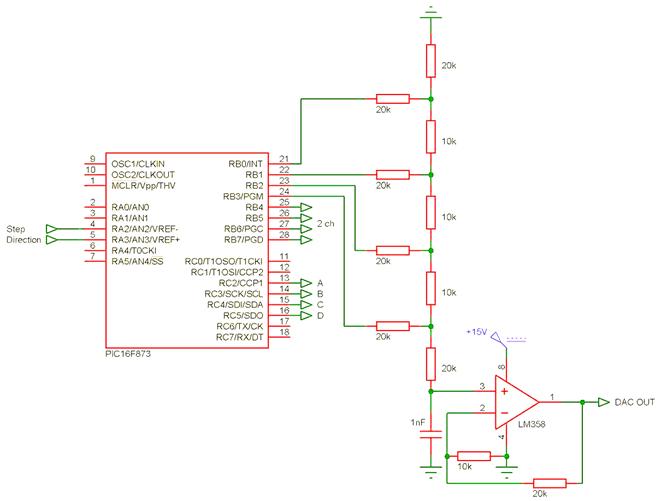
Схема подобного цифроаналогового преобразователя с применением матрицыR-2R приведена на рисунке 3.

Рисунок 3. Принципиальная схема четырехразрядного цифро-аналогового
преобразователя R-2R
6. Практическая часть.
4-х битный ЦАП обеспечивает достаточное напряжение для 16-ти уровней
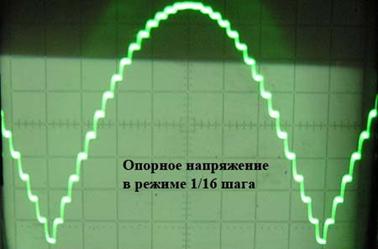
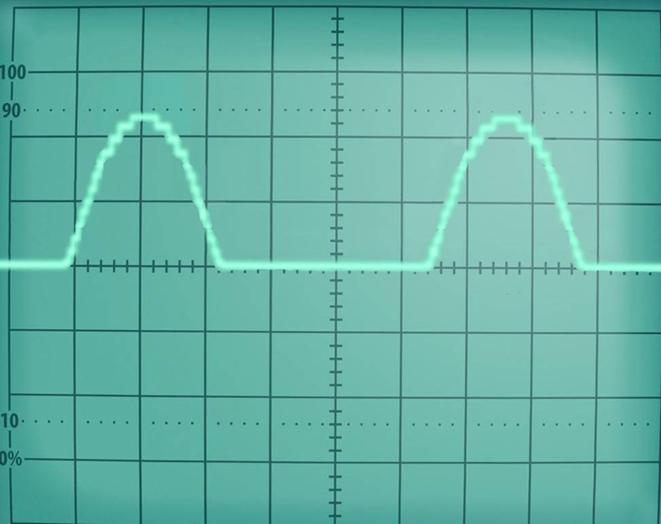
В идеале вместо прямоугольных импульсов на контакты шагового двигателя должно подаваться напряжение, осциллограмма которого представляет собой положительный полупериод синусоиды, т.е. аналоговый сигнал.
Микрошаг разбивает синусоиду на ступеньки, приближая управляющий сигнал к синусоидальной форме, что влечет за собой повышение качества работы ШД.
При использовании микроконтроллера для управления направлением и скоростью вращения ШД обычно применяются узлы согласования – контроллеры шаговых двигателей, которые берут на себя формирование управляющих сигналов для получения микрошагового режима работы двигателя.
●Подключение Цифро-Аналоговый Преобразователь к Микро Контроллеру
У усилителя есть 2 задачи
1)Исключает потребление последующей схемы ток. (с выхода не должны брать ток и поэтому мы в конце ставим операционник.)
2)Усилить напряжение в 3 раза ( берем не инвертируемую цепь и усиливает её в 3 раза)
Микросхема LM358 в одном корпусе содержит два независимых маломощных операционных усилителя с высоким коэффициентом усиления и частотной компенсацией. Отличается низким потреблением тока. Особенность данного усилителя – возможность работать в схемах с однополярным питанием от 3 до 32 вольт. Выход имеет защиту от короткого замыкания
●Силовая часть схемы.
Драйвер двигателя L293D содержит два драйвера для управления электродвигателями небольшой мощности.
L293D обеспечивает разделение электропитания для микросхемы и для управляемых ею двигателей, что позволяет подключить электродвигатели с большим напряжением питания, чем у микросхемы.
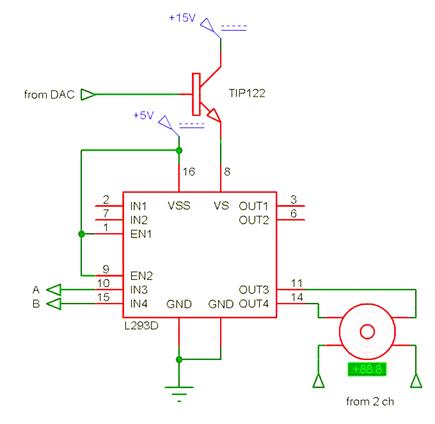
Разделение электропитания микросхем и электродвигателей может быть также необходимо для уменьшения помех, вызванных бросками напряжения, связанными с работой моторов.
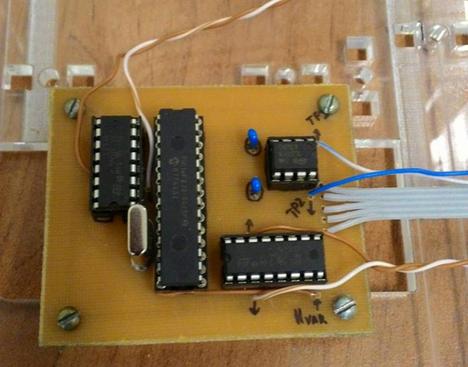
●Реализация контроллера
●Тестирование контроллера
7. Заключение
Создан контроллер для шагового двигателя работающего в микрошаговом режиме. Проведенное тестирование показало работоспособность данного контроллера.
Список литературы
1. Исмаилов, Ш.Ю. Автоматические системы и приборы с шаговыми двигателями //Ш.Ю.Исмаилов -М.: Издательство «Энергия», 1968.
2. Кенио Т. Шаговые двигатели и их микропроцессорные системы // Т. Кенио. - М.: Энергоатомиздат, 1987
3. © СТА-ПРЕСС soel.ru СОВРЕМЕННАЯ ЭЛЕКТРОНИКА № 2 2010
4. Чижма С.Н. Основы схемотехники. СПб., 2008. - 424с.
5. П. Хоровиц, У. Хилл Искусство схемотехники. Том 1. Издательство: М.: Мир. Год издания: 2003. Страницы: 600
6. Название: PIC-микроконтроллеры. Полное руководство. Автор: Катцен Сид. Год издания: 2010. Страниц: 651
7. http://radio-hobby.org/uploads/datasheets/pic/pic16f873-pic16f877.pdf
 (zip - application/zip)
(zip - application/zip)









