











 ВВЕДЕНИЕ
ВВЕДЕНИЕ
При автоматизации технологических объектов управления (ТОУ) широко применяют одноконтурные системы регулирования (АСР), обеспечивающие стабилизацию выходных координат объектов. Проектирование таких АСР предполагает знание статических и динамических характеристик ТОУ, позволяющих произвести расчет системы регулирования - определить структуру регулятора и найти параметры его настройки.
Основы расчета одноконтурной системы автоматического регулирования (САР) включает в себя определение свойств объекта регулирования (ОР), выбор и расчёт параметров настройки автоматического регулятора тремя методами:
- метод расширенных частотных
характеристик;
- метод незатухающих колебаний;
- по амплитудно-фазовой характеристике ОР.
Задачей расчета автоматической системы регулирования (АСР) является получение переходных процессов системы автоматического регулирования (САР) заданного качества. Качество переходных процессов автоматического регулирования определяется свойствами системы в целом. В свою очередь свойства системы складываются из свойств ее составляющих, т.е. из свойств объекта регулирования и автоматического регулятора. Поскольку объект регулирования является неизменяемой частью системы, то для достижения заданных свойств системы в целом необходимо выбрать соответствующий автоматический регулятор. Следовательно, с помощью регулятора системе придаются свойства, обеспечивающие заданное качество регулирования. Таким образом, расчет системы автоматического регулирования включает две задачи:
- определение свойств объекта
регулирования;
- выбор и расчет автоматического регулятора с такими параметрами, чтобы
автоматический регулятор дополнил характеристики объекта регулирования и
обеспечил необходимое качество регулирования.
 1.
Определение свойств объекта регулирования.
1.
Определение свойств объекта регулирования.
Исследовать свойства объекта регулирования и получить статические и динамические характеристики объекта можно аналитическими или экспериментальными методами.
1.1. Аналитический метод определения характеристик
Процессы,
характеризующиеся одной выходной и одной входной величинами могут быть описаны
дифференциальным уравнением:  (1)
(1)
где, А – постоянный
коэффициент, имеющий конкретное значение для того или иного процесса.
∆Q -
результирующее материальное или энергетическое воздействие на объект.
Выведем дифференциальное уравнение изменения уровня в нижней части колонны.

Рис.1. Приток и сток в колонне
В равновесном состоянии: Qпр=Qст
При появлении ∆Q= Qпр-Qст разности уровень будет увеличиваться или уменьшаться.
Если сечение колонны const=F, тогда
уравнение (1) для переходного режима примет вид:  (2)
(2)
Пусть изменение ∆Qпр не
зависит от уровня, а ∆Qст -
зависит, т.е. при изменении уровня изменяется расход стока.
Тогда при небольших изменениях уровня эту зависимость можно записать:
∆ Qст=C∆L
(3)
где, С – коэффициент пропорциональности, ∆L-изменение
уровня
Подставляем уравнение (3) в (2) и
получим: 

постоянная времени объекта:

коэффициент усиления объекта:

 (4)
(4)
 (5)
(5)
Характер изменения уровня определяем, решив уравнение:

Характеристическое уравнение соответствующее этому уравнению:


Общее решение уравнения (4):

Частное решение ∆L2(t) находим из условия равновесия, т.е. когда ∆Qпр-Qст и ∆L-const

t=∞
Полное решение уравнения:

 Определяем
постоянную С из начального условия.
Определяем
постоянную С из начального условия.
При t=0, ∆L(0)=0

Следовательно:

Динамические свойства объекта соответствуют апериодическому звену.
Расчёт:
Определить численное значение Т0 и К0 и построить переходную
характеристику для объекта регулирования по Рис.1.
Дано: F = 7,6 м2; F0 = 0,002 м2 – проходное сечение клапана на стоке; α = 0,6 – коэффициент расхода; p = 800 кг/м3 – плотность жидкости; L3 = 4м –уровень.
Определим объемный расход жидкости через клапан:

учитывая, что Р2 =
0, P1=Lpg

Подставив исходные данные, получим:
Qст

Для определим коэффициент пропорциональности С, можно построить график Qст от L.
Таблица 1. Данные:
|
L |
0,5 |
1 |
1,5 |
2 |
2,5 |
3 |
|
Qcт |
0,0038 |
0,0055 |
0,0065 |
0,0075 |
0,0084 |
0,0092 |

Рис.2. График зависимости Qст от L.
Практически график имеет линейный характер. Взяв отношение любого значения

определяем коэффициент пропорциональности С:

C = 2·10-3м3/с·м
Определяем коэффициент усиления объекта:

Определяем постоянную времени объекта:
T0

Подставим численные значения К0 и Т0 в уравнение (6) получим:

По этому уравнению строим переходную характеристику.
Таблица
2. Данные:
|
t |
0 |
1000 |
2000 |
3000 |
4000 |
5000 |
6000 |
7000 |
8000 |
|
∆L |
0 |
1,27 |
2,25 |
3 |
3,5 |
4,02 |
4,36 |
4,62 |
4,83 |
По этому уравнению строим переходную характеристику Рис.3.

Рис.3.
Переходная характеристика объекта регулирования
1.2.
Экспериментальные методы определения характеристик объекта регулирования
Исследование статических характеристик
позволяет оценить чувствительность объекта к возмущениям и регулирующим
воздействиям, выбрать каналы регулирования, определить максимально допустимые
пределы возмущений, которые могут быть компенсированы регулирующими
воздействиями.
Связь между входными и выходными переменными в неустановившемся состоянии
характеризуют динамические свойства исследуемой системы. В большинстве случаев
необходимо просто найти реакцию системы на ступенчатое изменение входной
величины, т.е. получить переходную характеристику (кривую разгона) которая
является графическим представлением динамических свойств системы. Практически
проведение эксперимента по определению статических характеристик производится
следующим образом:
Орган управления (задвижка, клапан, вентиль) установленный на линии притока или
стока энергии или вещества в объект, вручную или дистанционно переводят из
одного положения, соответствующего равновесному состоянию, в другое. При этом с
помощью измерительных приборов фиксируют входное и выходное значения.
Последовательно, изменяя положение затвора органа управления, записывают пары
значений выходных и входных величин, соответствующих каждому из равновесных
состояний. По полученным результатам строят статическую характеристику и
определяют коэффициент усиления объекта.
Динамическая характеристика объекта может быть представлена переходной или
частотной характеристикой. Получить экспериментальную временную (переходную)
характеристику действующего объекта можно в тех случаях, когда имеется
возможность скачкообразно изменить входную величину и записать реакцию объекта
на это возмущение. Для проведения эксперимента по снятию переходной
характеристики необходимо с помощью органа управления создать скачкообразное
изменение входной величины. Если объект обладает  самовыравниванием,
то выходную величину регистрировать до тех пор, пока объект не придет в новое
равновесное состояние. Если объект неустойчивый, то запись значений выходной
величины продолжить до тех пор, пока не установиться постоянная скорость ее
изменения.
самовыравниванием,
то выходную величину регистрировать до тех пор, пока объект не придет в новое
равновесное состояние. Если объект неустойчивый, то запись значений выходной
величины продолжить до тех пор, пока не установиться постоянная скорость ее
изменения.

Рис.4. - Кривая разгона объекта при единичном скачкообразном изменении входной величины
Кривая разгона характеризуется тремя параметрами:
T0 - постоянная времени объекта (емкость). Это способность к накоплению вещества или энергии.
τ – время запаздывания. Это время с момента подачи возмущающего воздействия до начала изменения выходной величины
К0 - коэффициент усиления объекта. Это отношение выходной величины к входной.
К0

2. Расчет оптимальных параметров настройки автоматического регулятора
Оптимальные параметры настройки автоматического регулятора определяют качество процессов автоматического регулирования. Основные требования, предъявляемые к САР – это устойчивость их работы. В связи с этим определяют
границы устойчивости САР, обеспечивающих возникновение устойчивого переходного процесса.
В теории автоматического регулирования применяется ряд методов расчета устойчивости систем:
-
метод расширенных частотных характеристик
- метод незатухающих колебаний;
- метод расширенных амплитудно-фазовых характеристик;
2.1 Метод расширенных частотных характеристик
Расширенная частотная характеристика отражает свойства объекта (или регулятора) при подаче на вход синусоидальных возмущений с затухающей амплитудой.

где, m – степень колебательности, характеризует затухание его колебательных составляющих и численно равна абсолютному значению отношения действительной части к коэффициенту при мнимой части корня характеристического уравнения с наименьшим абсолютным значением этого отношения.
Между степенью затухания Ψ и степенью колебательности m существует определенная зависимость: Ψ=1-ехр(-2πm)
Расширенные частотные характеристики W(m,j,ω ) получают аналитически из передаточных функций, заменой р на комплексную переменную (-mω+jω). При этом степень колебательности m обычно принимают равной 0,221 или 0,366, что соответствует степени затухания процесса Ψ, равной 0,75 или 0,9, т.е. затуханию процесса за три или два периода колебаний.
Расчёт:
Определить настроечные
параметры ПИ-регулятора
Дано: Объект регулирования представлен передаточной функции апериодического
звена

T0 = 3800, К0 = 500, m=0,221
Решение: Расширенная
частотная характеристика имеет вид: W0(J;ω)=
Заменим р на комплексную переменную (-mω+jω)
и определим расширенную АЧХ:
Aоб
(m,j,ω )=
Aоб
(m,j,ω)=
Подставим численные значения К0 и T0 определим Aоб (m,j,ω) при изменении ω от 0 до ∞
Таблица 3. Данные:
|
w |
0 |
0,025 |
0,05 |
0,075 |
0,1 |
0,2 |
0,3 |
|
АЧХ |
500 |
5,15 |
2,5 |
1,7 |
1,28 |
0,64 |
0,42 |
|
w |
0,4 |
0,5 |
0,6 |
0,7 |
0,8 |
0,9 |
1 |
|
АЧХ |
0,32 |
0,25 |
0,21 |
0,18 |
0,16 |
0,14 |
0,12 |
Определим расширенную фазо-частотную характеристику объекта:
Φоб
(m,j,ω)
= 
Φоб
(m,j,ω)
= 
Подставим численные значения К0 и T0 определим Фоб (m,j,ω) при изменении ω от 0 до ∞ определяется ФЧХ объекта
Таблица
4. Данные:
|
w |
0 |
0,025 |
0,05 |
0,075 |
0,1 |
0,2 |
0,3 |
|
ФЧХ |
-1,57 |
-2,57 |
-2,57 |
-2,57 |
-2,57 |
-2,57 |
-2,57 |
|
w |
0,4 |
0,5 |
0,6 |
0,7 |
0,8 |
0,9 |
1 |
|
ФЧХ |
-2,57 |
-2,57 |
-2,57 |
-2,57 |
-2,57 |
-2,57 |
-2,57 |
Определим настройки регулятора:


где, 
Таблица
5. Данные:
|
W |
0 |
0,02 |
0,05 |
0,075 |
0,1 |
0,2 |
0,3 |
0,4 |
0,5 |
0,6 |
0,7 |
|
Kp |
0,001 |
0,2 |
0,4 |
0,6 |
0,8 |
1,5 |
2,4 |
3,1 |
4 |
4,7 |
5,5 |
|
S0 |
0 |
-0,004 |
-0,01 |
-0,03 |
-0,06 |
-0,2 |
-0,5 |
-1 |
-1,5 |
-2,2 |
-3 |
|
j |
0,24 |
1,22 |
1,22 |
1,22 |
1,22 |
1,22 |
1,22 |
1,22 |
1,22 |
1,22 |
1,22 |
Задаваясь различными значениями частоты ω, рассчитываются настройки Kp и S0, строится линия с равной степенью колебательности m.

Рис 5- строится линия с равной
степенью колебательности m
Визуально из графика определяется значение ωмах, затем рабочая частота ωраб и соответствующие ей оптимальные настройки ПИ-регулятора:
ωраб=1,12· ωмах,= 1,12·0,25=0,28
Для рабочей частоты ωраб = 0,28 соответствуют следующие настройки регулятора:
Kp
= 0,5937495
S0
= 0,002593
По значению S0, определяется время изодрома регулятора ТИ:
ТИ
=  с
с
2.2 Расчёт параметров настройки автоматического регулятора по экспериментальной, переходной характеристике
Определяются динамические свойства на полученной экспериментально переходной характеристике объекта. Снятие кривой разгона предусматривает нанесение на объект ступенчатого возмущения путем энергичного изменения степени открытия проходного сечения регулирующего органа, при этом отмечает величину и момент нанесения возмущения. Изменение выходной величины регистрируют до тех пор, пока объект не примет нового установившегося значения.
Расчёт: Определить настроечные параметры ПИ-регулятора.
Дано: Тс=33с – постоянная времени, τ=8с
Решение:
1. Перевести значение входной и выходной величин в относительные величины по
формулам:

где,
Y0
– текущее заданное значение регулируемой величины, абсолютное до переходного
процесса; Ym
– текущее значение регулируемой величины в переходном процессе; Y
– относительное значение регулируемой величины.

где, Х0 –
регулирующее воздействие, абсолютное до переходного процесса; Хр –
регулирующее воздействие в переходном процессе; Х – относительное регулирующее
воздействие в переходном режиме.

Таблица 6. Данные эксперименты.
|
t,c |
0 |
30 |
60 |
90 |
110 |
130 |
150 |
170 |
190 |
|
Ym кгс/см2 |
1,24 |
0,98 |
0,84 |
0,76 |
0,7 |
0,68 |
0,66 |
0,64 |
0,64 |
|
Y= (Ym-Y0)|Y0 |
0 |
0,22 |
0,323 |
0,387 |
0,435 |
0,452 |
0,468 |
0,484 |
0,484 |

Рис.6. Кривая разгона
Исходные данные для расчёта определяются
кривой разгона К0= -
коэффициент передачи объекта. К0 =
-
коэффициент передачи объекта. К0 = 
2. Определяется характер действия регулятора ориентировочно по величине:

Так как 0,2 <  <1,
то выбирается регулятор непрерывного действия.
<1,
то выбирается регулятор непрерывного действия.
3. Выбирается типовой переходной процесс. Система регулирования обеспечит
граничный апериодический процесс.
4. Задание показателей качества переходного процесса Y1доп
= 0,22 – динамическая ошибка; 0,01-статическая ошибка; tp.доп.=100с
– время регулирования; Хв = 0,0111 – регулирующее воздействие,
соответствующее максимальному изменению возмущения.
5. Выбирается закон регулирования регулятора.
Максимальное отклонение регулируемой величины:
Y0 = К0· Х0 = 4,36·0, 111 = 0,483
Динамический
коэффициент передачи системы определяется по графику:
 |
Рис.7. Динамический коэффициент регулирования
И-регулятор: Rg=0,8
П-регулятор: Rg=0,48
ПИ-регулятор: Rg=0,35
ПИД-регулятор: Rg=0,25
Динамическая ошибка системы: Y1=Pg·Y
И-регулятор: Y1=0,8·0,484=0,39
П-регулятор: Y1=0,48·0,484=0,23
ПИ-регулятор: Y1=0,35·0,484=0,17
ПИД-регулятор: Y1=0,25·0,484=0,12
Таким образом в системе с И-регулятором Y1>Y1.доп., следовательно, И-регулятор не обеспечит заданное качество регулирования.
Статическая ошибка регулирования определяется по графику:
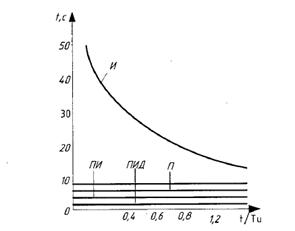
Рис.8. Статические ошибки регулирования и времени регулирования.
По графику находим величину Yст;
Yст=0,4;
Yст=
Yст·
Y0=0,4·0,484=0,19
Следовательно, в системе с П-регулятором Yст>
Yст.доп
и заданное качество регулирования не будет обеспечено. Время регулирования tp
определяется: tp= ,
где
,
где  -
определяется по графику (см.рис.9)
-
определяется по графику (см.рис.9)
ПИ-регулятор: =8;
ПИД-регулятор: =5
Для ПИ-регулятора: tp=8·8=64с
Для ПИД-регулятора: tp=5·8=40с
Для систем с ПИ и ПИД регуляторами tp< tp.доп и,следовательно, оба регулятора обеспечат заданное качество регулирования. Выбираем ПИ-регулятор, так как у него более простой закон регулирования.
Оптимальное значение параметров настройки регулятора:
Кр = Кр · Кд


рис. 9 Настроечная кривая
Кр
· Кд = 2,1
Кр = 2,1/4,36 = 0,48
Предел пропорциональности
δ= 1/Кр · 100%
δ= (1/0,48) · 100% = 208%
Время интегрирования:
Ти = (Ти /τ)· τ
(Ти /τ) = 3,5
Ти = 3,5 · 8 = 28с
Таким образом,
выбирается ПИ – регулятор с линейными статическими характеристиками типа ПР3.31
с неограниченными параметрами δ= 208%,
Ти = 28с.
2.3 Расчёт параметров настройки регулирования по амплитудно-фазовой характеристике
При
использовании метода определения настройки регулятора по АФХ объекта
необходимо обеспечить выполнение установленных
требований к расположению характеристики на комплексной плоскости,
обусловленных заданными значениями показателя колебательности М, запасов
устойчивости по модулю С и фазе φ, времени регулирования tр.
При отсутствии наперед заданных значений какого-либо из показателей качества
следует принимать М = 1,3-1,5, что обеспечит хорошее качество переходных
процессов в замкнутой системе регулирования.
Расчёт: Определить настроечные параметры ПИ-регулятора.
Дано: Объект регулирования описывается апериодическим звеном первого порядка с передаточной функцией: T0 = 3800, К0 = 500

Решение: По передаточной функции объекта определяется его АФХ, заменой p на jω

Числитель и знаменатель умножается на знаменатель комплексно-сопряженный:

Выделяем действительную и мнимую часть:


Подставляя значения частоты ω от 0 до ∞, строится АФХ разомкнутой
системы с К1=1 для фиксированных значений Ти (в нашем
случае Ти=1,1). Для этого вектор АФХ замкнутой системы изменяется в
Ти ω раз, поворачивается на 90° в отрицательном направлении (Х·
Ти·ω, где Х-длина вектора замкнутой АФХ) и геометрически
суммируется с исходным.

Проводится луч под углом в отрицательной полуоси

Вычерчивается окружность радиуса r с центром на вещественной отрицательной полуоси, касающуюся АФХ разомкнутой системы и луча.
Таблица 7: Данные:
|
w |
0 |
0,00006 |
0,0001 |
0,00015 |
0,0002 |
0,00025 |
0,00035 |
0,0005 |
0,0006 |
|
Re |
529,0 |
495,4 |
445,2 |
371,6 |
301,8 |
243,0 |
160,0 |
92,7 |
68,0 |
|
Im |
0,0 |
-129,0 |
-193,2 |
-241,9 |
-261,9 |
-263,6 |
-243,0 |
-201,1 |
-177,1 |
|
w |
0,0008 |
0,001 |
0,0015 |
0,0025 |
0,004 |
0,006 |
0,01 |
0,1 |
1 |
|
Re |
4,05 |
26,7 |
12,2 |
4,5 |
1,8 |
0,8 |
0,3 |
0,0 |
0,0 |
|
Im |
-14,07 |
-115,8 |
-79,4 |
-48,4 |
-30,4 |
-20,3 |
-12,2 |
-1,2 |
-0,1 |

Рис.10.
Амплитудно-фазовая характеристика
2.4.Расчёт
параметров настройки автомат. регулирования методом незатухающих колебаний
Этот метод позволяет определить настройки регулятора, обеспечивающие определенный запас устойчивости АСР и удовлетворительное качество переходных процессов. Определение настроек регулятора производится в два этапа:
- определяется критическая частота ωкр и критическая настройка Кркр пропорционального регулятора, при которой в замкнутой АСР возникают затухающие колебания у(t);
- определяется по Кркр настроек регуляторов по приближенным формулам.
Определение критической частоты ωкр и настройки Кркр
Если разомкнутая система устойчивая и ее АФХ проходит через точку (1j0), то замкнутая АСР будет находиться на границе устойчивости.
Условие нахождения АСР на границе устойчивости: Wраз(jω)=1
тогда получим:

это условие
выполняется, если:


Амплитудно-фазовая характеристика пропорционального регулятора имеет вид:

или в показательной форме:

для расчета настройки Кркр и ωкр частоты получим два уравнения:


Расчёт: Определить критическую частоту и настройки ПИ-регулятора
Дано:
Объект регулирования представлен передаточной функцией апериодического звена:

T0 = 3800, К0 = 500, m=0,221
Решение: Поскольку АФХ
П-регулятора имеет вид Wр(jω)=К0,
то для расчёта настройки Ккр и ωкр получим
уравнения:
Из второго уравнения определяется критическая частота ωкр. Так как объект регулирования представлен передаточной функцией апериодического звена, то



Преобразив последнее уравнение находится ωкр:
ωкр=
ωкр=
Из первого уравнения определяется критическая настройка Кркр

Кркр=
По критическим значениям Кркр и ωкр определяются настройки ПИ-регулятора по приближенным формулам:
Кр = 0,45· Кркр = 0,45·0,25 = 0,1125
S0
= Кркр·1,12 =0,08
Кркр·ωкр = 0,398
=0,08
Кркр·ωкр = 0,398
Ти= =
0,282
=
0,282
Найденные настройки обеспечивают устойчивый переходной процесс со степенью затухания
2.5. Расчет пропускной способности, выбор условного прохода и пропускной характеристики исполнительного устройства
Необходимым условием надежной работы автоматических систем регулирования является правильный выбор формы теоретической расходные характеристики и выбор условного прохода исполнительного устройства. При расчёте АСР используют рабочие расходные характеристики регулирующих органов, так как расходная характеристика определяет значение коэффициента передачи регулирующего органа для каждого положения затвора. Желаемая форма расходной характеристики определяются с учётом зависимости свойств объекта от изменения нагрузки
Расчет регулирующего органа
Исходные данные:
1. Среда - вода
2. Номинальный расход – Qном=154 м3/ч
3. Максимальный расход - Qмин=198 м3/ч
4. Минимальный расход - Qмакс=110 м3/ч
5. Перепад давления на регулирующем органе при максимальном расчете расходе ΔPр.о.макс=16кГс/см2
6. Температура - 90°
7. Плотность - 1
8. Абсолютное давление до регулирующего органа Р=18кГс/см2
Расчёт: 1. Единицы измерения сходных данных в единицы требуемые формулами.
Qмакс
= 
Qном
= 
Qмин
= 
Р1 = 18кГс/см2
= 18·98066,5 = 1765197 
∆Ppo=16кГс/см2 =
16·98066,5 = 1569064
p=1 =1000
=1000

t=90°C
2.Определяем максимальную пропускную способность:
Кvмакс=36·103·0,055 = 49
= 49
3. Находим
Кvy=1,2·49=58 и выбираем по таблице, двухседельный регулирующий орган с
линейной расходной
характеристикой с Кvy = 64 и Dy = 64мм. А так как n= пропускную характеристику регулирующего органа берём тоже
линейную.
пропускную характеристику регулирующего органа берём тоже
линейную.
4. Для уточнение правильности выбора клапана находим коэффициент пропускной способности для номинальной и минимальной нагрузок^
Kvном = 36·103··0,042 = 38
= 38
Kvмин = 36·103··0,03 = 25
5. Определяем степень открытия клапана при максимальном, номинальным и минимальным расходах.
Клапан открыт:
При
максимальной нагрузке на 
При
номинальной нагрузке на 
При
минимальной нагрузке на 
Следовательно принятый размер клапана приемлем

Рис.11. Линейные и равнопроцентные расходные характеристики регулирующего органа
 ЗАКЛЮЧЕНИЕ
ЗАКЛЮЧЕНИЕ
В курсовом
проекте приведён расчет одноконтурной системы автоматического регулирования
уровня. В ходе выполнения курсового проекта произведены следующий расчёт и
использовались методы:
- Аналитический метод определения характеристик объекта регулирования
- Экспериментальный метод определения свойства объекта регулирования
- Расчет параметров настройки автоматического регулятора
- Метод расширенных частотных характеристик
- Расчет параметров настройки автоматического регулятора по экспериментальной, переходной характеристики
- Расчет параметров настройки регулирования по амплитуде фазовых характеристики
- Расчет параметров настройки автоматического регулятора методом незатухающих колебаний
- Расчет пропускной способности, выбор условного прохода и пропускной характеристики исполнительного устройства
На основании проведенных расчетов делаем вывод, что данные обеспечивают устойчивую работу системы автоматического регулирования.
Список использованной литературы:
1. Лазарева ТА., Мартемьянов Ю. Ф. Основы теории автоматического
Управления: Учебное пособие. 2-е издание, перераб. и доп. Тамб. гос. техн,
Ун-т, Тамбов,2004 (352) у р -
2. Дианов В.Г. Автоматическое регулирование и рег
лято ы в химической пРомышленности.-М. Химия, 1978. (3 76)
3. Горошков Б.И. Автоматическое управление.
-МИМО: Издательский центр «Академия»2003. (304с)
4. Комиссарчик В.Ф. Автоматическое
регулирование технологических процессов. Учебное пособие (Издание второе
расширенное). Тверской государственный технический университет, Тверь, 200/.
(248)
5. Бесекерский, В.А. Теория систем
автоматического управления / ВА. Бесекерский, ЕЛ. Попов. - Ч-е изд., перераб. и
доп. - СПб. : Профессия, 2004.
- 752 С.
б. Гудвин, ГК. Проектирование систем
управления / ГК. Гудвин, С. Ф. Гребе,
МЭ. Сальгадо. - М. : БИНОМ, Лаборатория
знаний, 2004. - 911 с.
7. Муромцев, ЮЛ. Основы автоматики и системы
автоматического управления : учебное пособие / ЮЛ Муромцев, ДЮ. Муромцев. - Тамбов
: Изд-во Тамб. гос. техн. ун-та, 2008. - Ч. 1. -96 с.
8. Кориков А.М Основы теории управления:
Учебное пособие. 2-е изд. - Томск: изд-во НТЛ, 2002. -392 С.
9. Теория систем автоматического
регулирования. Бесекерский. - Москва: Издательство «Наука», /972.
10. Теория автоматического управления/ СЕ.
Душин [и др. ]. - М.." Высш. Шк.,
2005. - 567 С
 (zip - application/zip)
(zip - application/zip)









